Section 6 Processors with multiprogramming ability 275
The method of peripheral control permitted the attachment of a large number of on-line peripherals with rapid response and entry into the operating system for a peripheral requiring attention. This, together with the multiprogramming features, makes the design ideal for the attachment of keyboards for the provision of multi- access operation. In the original design, provision for several such on-line typewriters was made, but at the production stage it was decided to remove these as an economy measure. In view of the subsequent development of on-line operation, this was rather an unfortunate decision.
The Atlas computer at the University has now been in continuous operation for four years and it is expected to provide for the major part of the University's computing needs until 1971.
During the period of its operation the provision of extensive monitoring and logging information has permitted the behaviour of the system to be studied in detail. The results of these studies have been extremely valuable in the design of a successor to the Atlas.
Design of the B 5000 System
The Burroughs B 5000 computer is described in Part 3, Sec. 5, page 257, Chap. 22.
A user machine in a time-sharing system
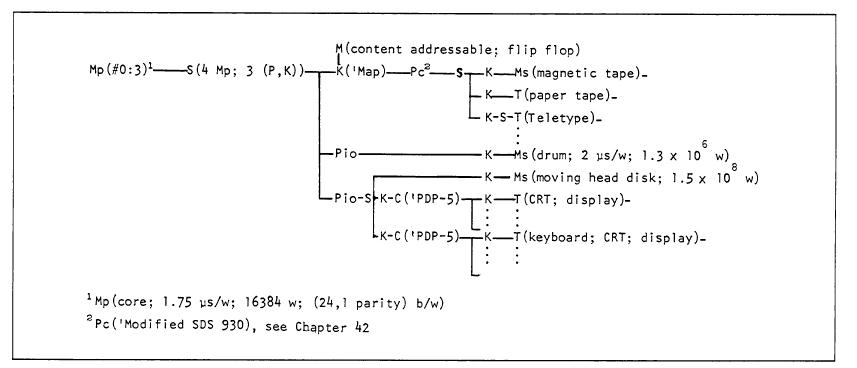
The Berkeley Time-Sharing Computer (Fig. 1) is based on the SDS 930 (Chap. 24). The hardware modifications to the SDS 930, together with the operating system software, were sold by Scientific Data Systems as the SDS 940. The operating system and hardware modifications for multiprogramming make the 940 one of the first commercially available combined hardware-software time-sharing computers.1
The description in Chap. 24 is concerned with the machine as it appears to the user. That is, the hardware and the operating system software are both presented in the context in which they contribute to form a user machine.
The 940 uses a memory map which is almost a subset of that of Atlas but is more modest than that of the IBM 360/67 [Arden et al., 1966] and GE 645 [Dennis, 1965; Daley and Dennis, 1968]. A number of instructions are apparently built in via the programmed operator calling mechanism, based on Atlas extracodes (Chap. 23). The software-defined instructions emphasize the need for hardware features. For example, floating-point arithmetic is needed when several computer-bound programs are run. The SDS 945 is a successor to the 940, with slightly increased capability but at a lower cost.
Fig. 1. University of California (Berkeley) time-shared-computer PMS diagram.
1Time-shared computers consist of both hardware and a complex software operating system. Adams Computer Characteristics Quarterly lists the deliveries of general-purpose time-shared computers as DEC PDP-6 hardware, October, 1964 (software in early 1965); SDS 940 hardware (and Berkeley software) April, 1966; GE 635, 645 hardware, May, 1965 (M.I.T's project MULTICS software, around 1969); IBM System/360 Model 67 hardware, March, 1966 (software, around 1968).