430 Part 2 ½ Regions of Computer Space Section 5 ½ Networks
system modularity {Ornstein et al, 1975; Wulf and Bell, 1972]. The trend
has been toward decentralization for reliability; loosely coupled multiprocessor
systems depend less on shared central memory and more on thin wires
for interprocess communication with increased component isolation [Metcalfe,
1972a; Roberts and Wessler, 1970]. With the continued thinning of interprocessor
communication for reliability and the development of distributable applications,
multiprocessing is gradually approaching a local form of distributed computing.
1.3 Local Computer Networking
Ethernet shares many objectives with other local networks such as Mitre's Mitrix, Bell Telephone Laboratory's Spider, and UC. Irvine's Distributed Computing System (DC S) [Farber et al., 1973; Farber, 1975; Fraser, 1975; Willard, 1973]. Prototypes of all four local networking schemes operate at bit rates between one and three megabits per second. Mitrix and Spider have a central minicomputer for switching and bandwidth allocation, while DC S and Ethernet use distributed control. Spider and DCS use a ring communication path, Mitrix uses off-the-shelf CATV technology to implement two one-way busses, and our experimental Ethernet uses a branching two-way passive bus. Differences among these systems are due to differences among their intended applications, differences among the cost constraints under which trade-offs were made, and differences of opinion among researchers.
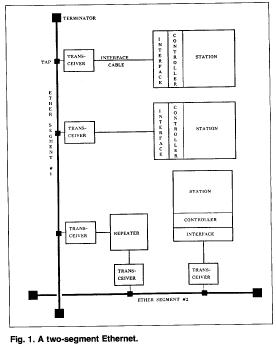
Before going into a detailed description of Ethernet, we offer the following
overview (see Fig. 1).
2. System Summary
Ethernet is a system for local communication among computing stations. Our experimental Ethernet uses tapped coaxial cables to carry variable length digital data packets among, for example, personal minicomputers, printing facilities, large file storage devices, magnetic tape backup stations, larger central computers, and longer-haul communication equipment.
The shared communication facility, a branching Ether, is passive. A station's Ethernet interface connects bit-serially through an interface cable to a transceiver which in turn taps into the passing Ether. A packet is broadcast onto the Ether, is heard by all stations, and is copied from the Ether by destinations which select it according to the packet's leading address bits. This is broadcast packet switching and should be distinguished from store-and-forward packet switching, in which routing is performed by intermediate processing elements. To handle the demands of growth, an Ethernet can be extended using packet repeaters for signal regeneration, packet filters for traffic localization, and packet gateways for internetwork address extension.
Control is completely distributed among stations, with packet transmissions coordinated through statistical arbitration. Transmissions initiated by a station defer to any which may already be in progress. Once started, if interference with other packets is detected, a transmission is aborted and rescheduled by its source station. After a certain period of interference-free transmission, a packet is heard by all stations and will run to completion without interference. Ethernet controllers in colliding stations each generate random retransmission intervals to avoid repeated collisions. The mean of a packet's retransmission intervals is adjusted as a function of collision history to keep Ether utilization near the optimum with changing network load.
Even when transmitted without source-detected interference, a packet
may still not reach its destination without error; thus, packets are delivered
only with high probability. Stations requiring a residual error
rate lower than that provided by the bare Ethernet packet transport mechanism
must follow mutually agreed upon packet protocols.