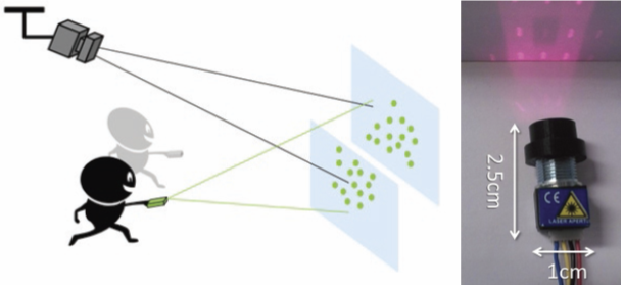
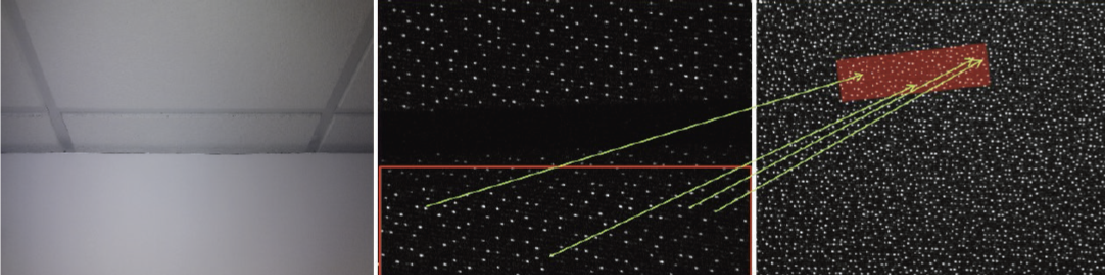
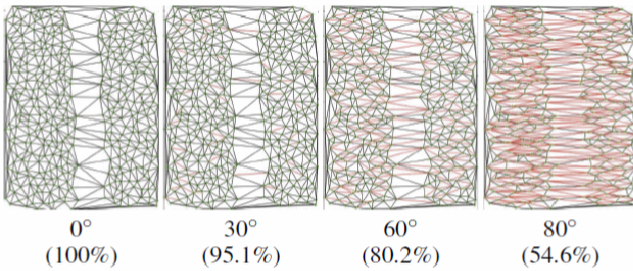
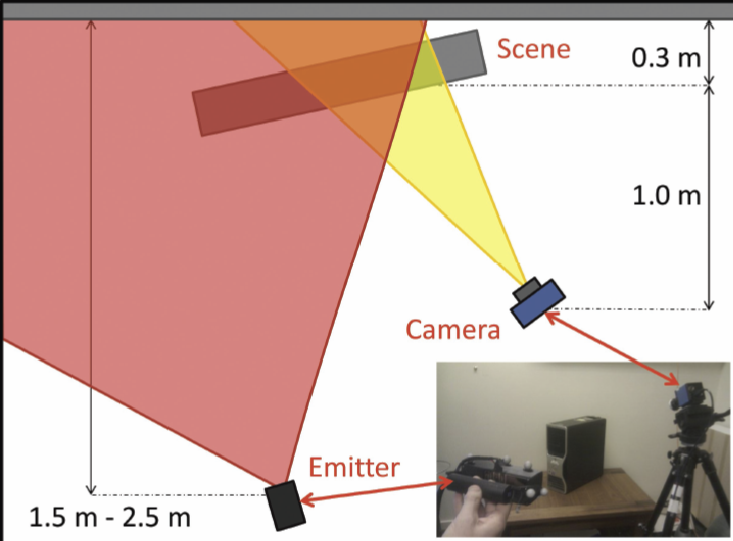
We present Kinectrack, a new six degree-of-freedom (6-DoF) tracker which allows real-time and low-cost pose estimation using only commodity hardware. We decouple the dot pattern emitter and IR camera of the Kinect. Keeping the camera fixed and moving the IR emitter in the environment, we recover the 6-DoF pose of the emitter by matching the observed dot pattern in the field-of-view of the camera to a pre-captured reference image. We propose a novel matching technique to obtain dot pattern correspondences efficiently in wide- and adaptive-baseline scenarios. We also propose an auto-calibration method to obtain the camera intrinsics and dot pattern reference image. The performance of Kinectrack is evaluated and the rotational and translational accuracy of the system is measured relative to gparound truth for both planar and multi-planar scene geometry. Our system can simultaneously recover the 6-DoF pose of the device and also recover piecewise planar 3D scene structure, and can be used as a low-cost method for tracking a device without any on-board computation, with small size and only simple electronics.