
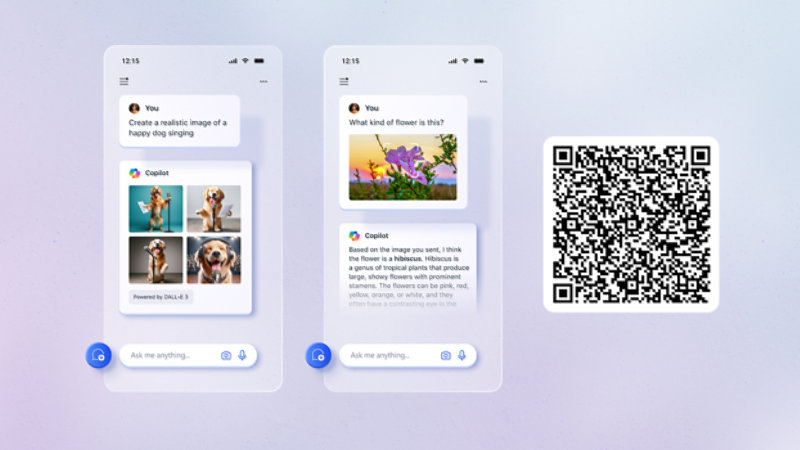
Unlock your potential with Microsoft Copilot
Get things done faster and unleash your creativity with the power of AI anywhere you go.
Converting 2-D Video to 3-D
We offer MATLAB code to take a normal, 2-D video and automatically compute depth at every frame. Last published: July 26, 2012.
Important! Selecting a language below will dynamically change the complete page content to that language.
Version:
1.0
Date Published:
5/11/2016
File Name:
depthtransfer.zip
File Size:
17.8 MB
We offer MATLAB code to take a normal, 2-D video and automatically compute depth at every frame. We also offer a database to help users learn the association of 2-D to depth.Supported Operating Systems
Windows 10, Windows 7, Windows 8
- Windows 7, Windows 8, or Windows 10
- Click Download and follow the instructions.
Follow Microsoft