Efficient Global Methods for Robust Computer Vision
In many computer vision tasks, we have to explore a large set of possible patterns to find at least one that conforms to a model. I propose efficient methods to tackle problems in different domains by taking advantage of the special structures of high-order global models. By constructing global methods properly, we can match objects quickly and reliably in cluttered images. Quickly localizing an object in clutter when the imagery of the target may appear scaled, rotated and deformed is a challenging task. Due to the scale and rotation consistency constraint, all the object parts are coupled together. I proposed two efficient approximation methods. The first one assumes convex pairwise term. This method has a unique lower convex hull property that allows us to discard large number of target points without sacrificing the quality of the solution. The second method allows general pairwise metrics on a tree augmented by linear nontree edges. This method enables us to search in the continuous scale and rotation space and in virtually arbitrary scale ranges efficiently.
High-order global methods also enable more reliable multiple object tracking. I proposed a multiple shortest path method that is able to handle occlusion, appearance consistency and group layout consistency in a uniform framework. Human pose estimation also benefits from global approaches. I proposed a consistent max-covering method, in which finding human pose is formulated as assembling body parts to fit a rough object foreground and at the same time maintain a valid body plan. I also proposed an efficient method that is able to detect human poses even when we do not know the target scale and rotation. The global methods yield much better results than traditional tree structure methods. Other problems that I tackled using global models include topology constrained object figure/ground separation, key point localization on fast moving articulated object, and finding cuboids in RGBD images.
Speaker Details
Hao Jiang is currently a tenured associate professor in the Computer Science Department at Boston College. He received PhD in Computer Science at Simon Fraser University. He also received a doctor of engineering degree from Tsinghua University. Before he joined Boston College he worked at the University of British Columbia as a postdoctoral research fellow and MSR Asia as an associate researcher. His research interest includes computer vision and multimedia.
- Series:
- Microsoft Research Talks
- Date:
- Speakers:
- Hao Jiang
- Affiliation:
- Boston College
-
-

Jeff Running
-
Series: Microsoft Research Talks
-
-
-
-

Galea: The Bridge Between Mixed Reality and Neurotechnology
Speakers:- Eva Esteban,
- Conor Russomanno
-

Current and Future Application of BCIs
Speakers:- Christoph Guger
-

Challenges in Evolving a Successful Database Product (SQL Server) to a Cloud Service (SQL Azure)
Speakers:- Hanuma Kodavalla,
- Phil Bernstein
-
Improving text prediction accuracy using neurophysiology
Speakers:- Sophia Mehdizadeh
-
-
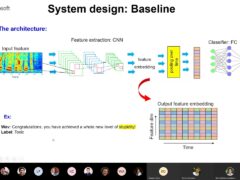
DIABLo: a Deep Individual-Agnostic Binaural Localizer
Speakers:- Shoken Kaneko
-
-

Recent Efforts Towards Efficient And Scalable Neural Waveform Coding
Speakers:- Kai Zhen
-
-
Audio-based Toxic Language Detection
Speakers:- Midia Yousefi
-
-
From SqueezeNet to SqueezeBERT: Developing Efficient Deep Neural Networks
Speakers:- Sujeeth Bharadwaj
-

Hope Speech and Help Speech: Surfacing Positivity Amidst Hate
Speakers:- Monojit Choudhury
-
-
-
-
-
'F' to 'A' on the N.Y. Regents Science Exams: An Overview of the Aristo Project
Speakers:- Peter Clark
-
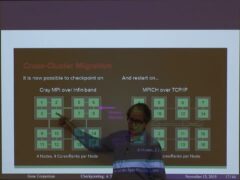
Checkpointing the Un-checkpointable: the Split-Process Approach for MPI and Formal Verification
Speakers:- Gene Cooperman
-

Learning Structured Models for Safe Robot Control
Speakers:- Ashish Kapoor
-
-