GPU Ocelot Tutorial
GPU Ocelot is an open-source dynamic JIT compilation framework for GPU compute applications targeting a range of GPU and non-GPU execution targets. Ocelot supports CUDA applications and provides an implementation of the CUDA Runtime API enabling seamless integration with existing CUDA applications. Its JIT compiler supports four backend execution targets – (1) an emulator that implements NVIDIAs Parallel Thread Execution (PTX) instruction set architecture, (2) NVIDIA, (3) AMD GPUs, and (4) a translator to LLVM for efficient execution of GPU kernels on multicore CPUs. An event trace analyzer is used with the emulator to generate instruction traces for driving microarchitecture timing simulators.
For more information, please visit;
http://research.microsoft.com/en-us/events/gpuocelot/
- Series:
- Microsoft Research Talks
- Date:
- Speakers:
- Andrew Kerr
- Affiliation:
- Georgia Tech
-
-

Jeff Running
-
Series: Microsoft Research Talks
-
-
-
-

Galea: The Bridge Between Mixed Reality and Neurotechnology
Speakers:- Eva Esteban,
- Conor Russomanno
-

Current and Future Application of BCIs
Speakers:- Christoph Guger
-

Challenges in Evolving a Successful Database Product (SQL Server) to a Cloud Service (SQL Azure)
Speakers:- Hanuma Kodavalla,
- Phil Bernstein
-
Improving text prediction accuracy using neurophysiology
Speakers:- Sophia Mehdizadeh
-
-
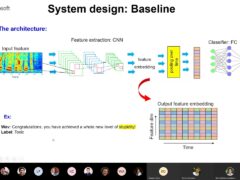
DIABLo: a Deep Individual-Agnostic Binaural Localizer
Speakers:- Shoken Kaneko
-
-

Recent Efforts Towards Efficient And Scalable Neural Waveform Coding
Speakers:- Kai Zhen
-
-
Audio-based Toxic Language Detection
Speakers:- Midia Yousefi
-
-
From SqueezeNet to SqueezeBERT: Developing Efficient Deep Neural Networks
Speakers:- Sujeeth Bharadwaj
-

Hope Speech and Help Speech: Surfacing Positivity Amidst Hate
Speakers:- Monojit Choudhury
-
-
-
-
-
'F' to 'A' on the N.Y. Regents Science Exams: An Overview of the Aristo Project
Speakers:- Peter Clark
-
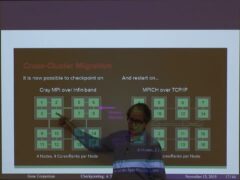
Checkpointing the Un-checkpointable: the Split-Process Approach for MPI and Formal Verification
Speakers:- Gene Cooperman
-

Learning Structured Models for Safe Robot Control
Speakers:- Ashish Kapoor
-
-